|
|
Décalage de l’imagerie
Les fournisseurs d’images font généralement un très bon travail de géoréférencement de leurs images, mais il arrive parfois que les images ne soient pas positionnées. Cela est particulièrement vrai dans les zones vallonnées ou montagneuses, où il peut être difficile d’étirer une image plate sur une zone de la Terre comportant de nombreux contours. Lorsque vous chargez des images dans le JOSM, elles peuvent parfois se trouver à dix mètres ou plus de leur position réelle. C’est ce qu’on appelle le décalage de l’imagerie. Remarquez dans l’image suivante que deux photographies aériennes distinctes ont été géoréférencées et fusionnées. Comme le géoréférencement n’est pas un processus parfait, les images ne s’alignent pas parfaitement l’une sur l’autre. Par conséquent, l’une d’entre elles, ou les deux, doivent être inexactes.
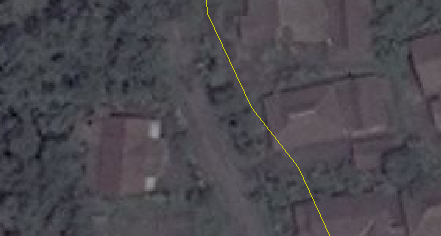
Nous avons appris à connaître deux grandes méthodes de cartographie : l’une consiste à utiliser des images aériennes pour identifier des éléments au sol, l’autre à utiliser le GPS pour enregistrer des traces et des points de repère, puis à les ajouter à OpenStreetMap. L’avantage de l’imagerie aérienne est évident. Elle vous permet, en tant que cartographe, d’avoir une vue d’ensemble, d’observer divers détails de l’image, de tenir compte de votre connaissance de la région et de tracer facilement les routes, les bâtiments et les zones. L’un des principaux avantages du GPS est toutefois qu’il ne souffre pas de décalage comme l’imagerie. Un GPS vous fournira toujours une latitude et une longitude correctes. La seule exception est lorsque les signaux satellites sont interrompus par de grands bâtiments ou des montagnes, mais dans ce cas, il est facile de reconnaître l’erreur. Observez la trace GPS sur cette image, comparée à la couche d’imagerie aérienne de Bing située en dessous :
Compte tenu de ce que nous savons maintenant, il est clair que la trace GPS est probablement exacte, et que l’image sous-jacente n’est pas à sa place. Nous devons donc maintenant nous demander : “si l’imagerie peut être déplacée, comment pouvons-nous encore l’utiliser et faire des cartes précises ?”. Correction du décalage de l’imagerieLa réponse à la question précédente est que nous pouvons déplacer l’imagerie afin qu’elle s’aligne sur des éléments dont nous savons qu’ils sont au bon endroit, comme les traces GPS. Il est facile de corriger le décalage de l’imagerie dans JOSM. Les meilleures références pour ajuster l’imagerie sont les pistes GPS qui suivent les routes. Et plus vous avez de pistes GPS à référencer, plus vous serez en mesure d’aligner votre imagerie avec précision. Comme les utilisateurs d’OpenStreetMap téléchargent souvent leurs traces GPS dans la base de données OSM, nous pouvons les télécharger et les utiliser pour aligner notre imagerie.
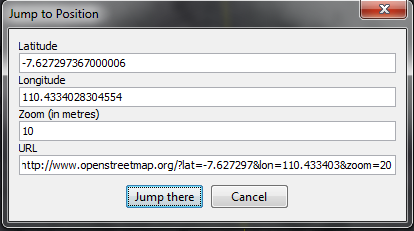
Que faire s’il n’y a pas de traces GPS sur OpenStreetMap, et que vous n’avez pas de GPS ? Sans traces GPS, il est difficile d’aligner l’imagerie. S’il s’agit d’une zone relativement vide (peu cartographiée), vous pouvez choisir d’utiliser simplement l’imagerie telle quelle et de corriger les données plus tard. Il est préférable de cartographier une zone décalée de 20 ou 30 mètres que de ne pas cartographier du tout. Si vous pouvez identifier de manière positive la latitude et la longitude d’un objet au sol, vous pouvez vous assurer que l’imagerie est correctement placée en suivant les étapes suivantes :
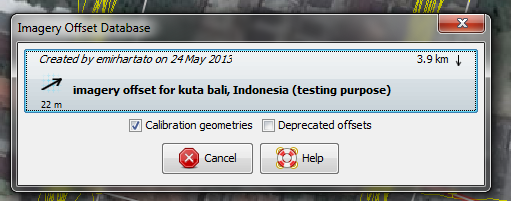
Si, au contraire, la zone a déjà été largement cartographiée, il est à espérer que les cartographes précédents ont dessiné les objets à leur emplacement correct. Dans ce cas, vous pouvez aligner l’imagerie sur la carte OSM, mais attention ! Il se peut que les autres cartographes ne soient pas au courant du décalage des images et qu’ils aient fait des erreurs en cartographiant. La base de données des décalages d’imagesVous savez maintenant comment surveiller et corriger le décalage de l’imagerie, mais cette approche présente un problème majeur que nous avons négligé jusqu’à présent. Si chaque utilisateur d’OpenStreetMap ajuste l’imagerie différemment, tout le monde va cartographier avec des fonds légèrement différents. Imaginez que vous êtes en train de cartographier une petite ville, et que vous vous rendez compte que l’imagerie Bing est décalée de 15 mètres vers le nord. Vous ajustez donc l’imagerie et l’utilisez pour cartographier toute la ville avec précision. Mais quelqu’un d’autre veut ajouter quelque chose à la carte, il télécharge donc les données et charge l’imagerie Bing, mais il n’est pas au courant du décalage d’imagerie que vous avez découvert ! Il pensera que quelque chose ne va pas et que tous les objets de la ville sont déplacés de 15 mètres, et il commencera à les déplacer, ce qui n’est pas correct ! Cela peut être désastreux pour les données cartographiques de la ville. C’est pourquoi il est important que tous les utilisateurs soient conscients du décalage des images et qu’ils le vérifient toujours avant de cartographier une zone. Pour résoudre ce problème, des personnes intelligentes ont créé un plugin qui permet aux utilisateurs de sauvegarder les informations de décalage dans une base de données et de les partager avec d’autres. Voyons comment cela fonctionne :
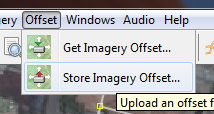
De la même manière que vous pouvez enregistrer des décalages comme signets, ce plugin vous permet d’enregistrer des décalages dans une base de données centrale et d’accéder aux décalages que d’autres utilisateurs ont créés. Ainsi, si un cartographe crée un offset d’imagerie dans une zone, d’autres utilisateurs peuvent utiliser exactement le même décalage pour cartographier. Lorsque vous utilisez des couches d’imagerie aérienne, vous devez TOUJOURS vérifier les décalages existants, et lorsque vous créez votre propre décalage, vous devez TOUJOURS l’enregistrer dans cette base de données. Ajouter le décalage de l’image à partir de la base de donnéesLorsque vous ajoutez une couche d’imagerie, le nouveau plugin vous avertit que vous devez vérifier la base de données d’imagerie pour un décalage existant. Vous verrez une icône avec un point d’exclamation rouge en haut du JOSM, comme ceci :
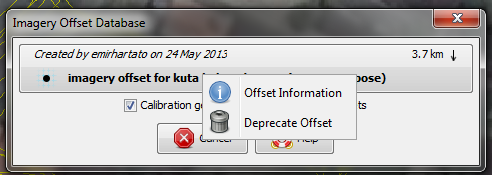
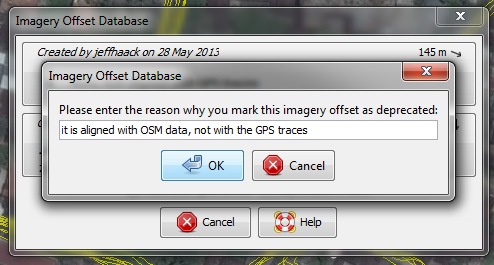
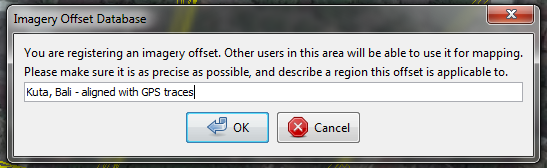
Ajouter le décalage de l’imagerie à la base de donnéesMaintenant que nous avons marqué le décalage de cet utilisateur comme “obsolète”, nous devons ajouter un décalage amélioré à la base de données.
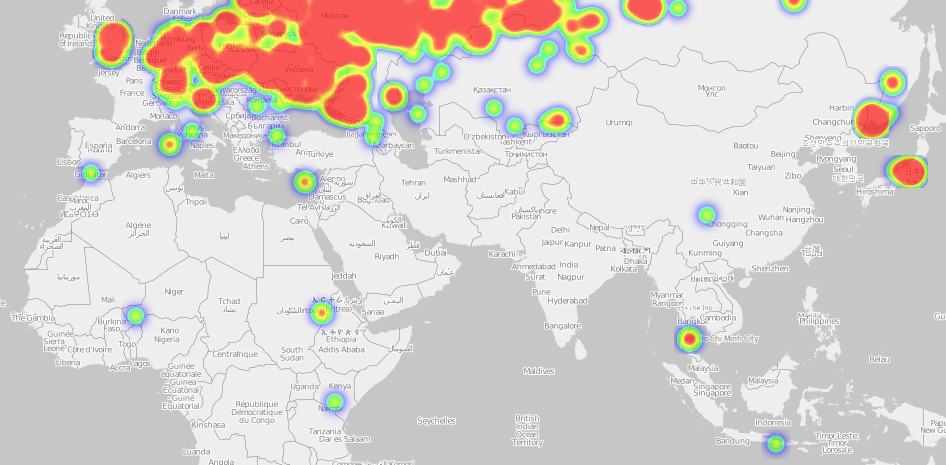
Oh non ! Quelqu’un a cartographié cette zone avec des images mal alignées, la zone n’est donc pas correctement cartographiée. Cela prendra un certain temps à réparer. Site web de la base de données d’imagerie décaléeEnfin, pour plus d’informations sur la base de données des compensations, vous pouvez visiter le site Web à l’adresse http://offsets.textual.ru/. Vous y trouverez la liste de toutes les compensations qui ont été téléchargées dans la base de données, ainsi qu’une carte qui permet de visualiser l’emplacement des compensations, comme vous pouvez le voir ici :
RésuméLorsque vous débutez dans OpenStreetMap, vous n’avez pas à vous soucier outre mesure du décalage de l’imagerie. Mais si vous voyez les modifications d’un autre cartographe qui semblent mal alignées par rapport à l’imagerie, vous devez toujours envisager la possibilité d’un décalage avant de commencer à modifier ses objets. Et si vous n’êtes pas encore prêt à gérer les décalages, rappelez-vous qu’il vaut mieux cartographier une zone avec un décalage de 20 ou 30 mètres que de ne pas la cartographier du tout. Mais lorsque cela est possible, n’oubliez pas qu’un décalage d’imagerie peut se produire et utilisez les étapes de ce chapitre pour le corriger si nécessaire.
Cette page était-elle utile ?
Faîtes-nous savoir comment améliorer ces guides !
|


 { : height=”24px”} en haut de la fenêtre de téléchargement. Sélectionnez votre zone et cliquez sur “Télécharger”.
{ : height=”24px”} en haut de la fenêtre de téléchargement. Sélectionnez votre zone et cliquez sur “Télécharger”.

 { : height=”24px”} en haut de JOSM.
{ : height=”24px”} en haut de JOSM.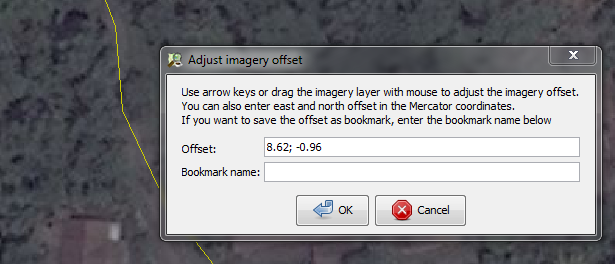
 { : height=”24px”}
{ : height=”24px”}